
Add BeagleBone Blue
Showing
- beaglebone-blue/accessories.rst 277 additions, 0 deletionsbeaglebone-blue/accessories.rst
- beaglebone-blue/code.rst 26 additions, 0 deletionsbeaglebone-blue/code.rst
- beaglebone-blue/faq.rst 208 additions, 0 deletionsbeaglebone-blue/faq.rst
- beaglebone-blue/flashing-firmware.rst 106 additions, 0 deletionsbeaglebone-blue/flashing-firmware.rst
- beaglebone-blue/index.rst 34 additions, 0 deletionsbeaglebone-blue/index.rst
- beaglebone-blue/ip-settings.rst 36 additions, 0 deletionsbeaglebone-blue/ip-settings.rst
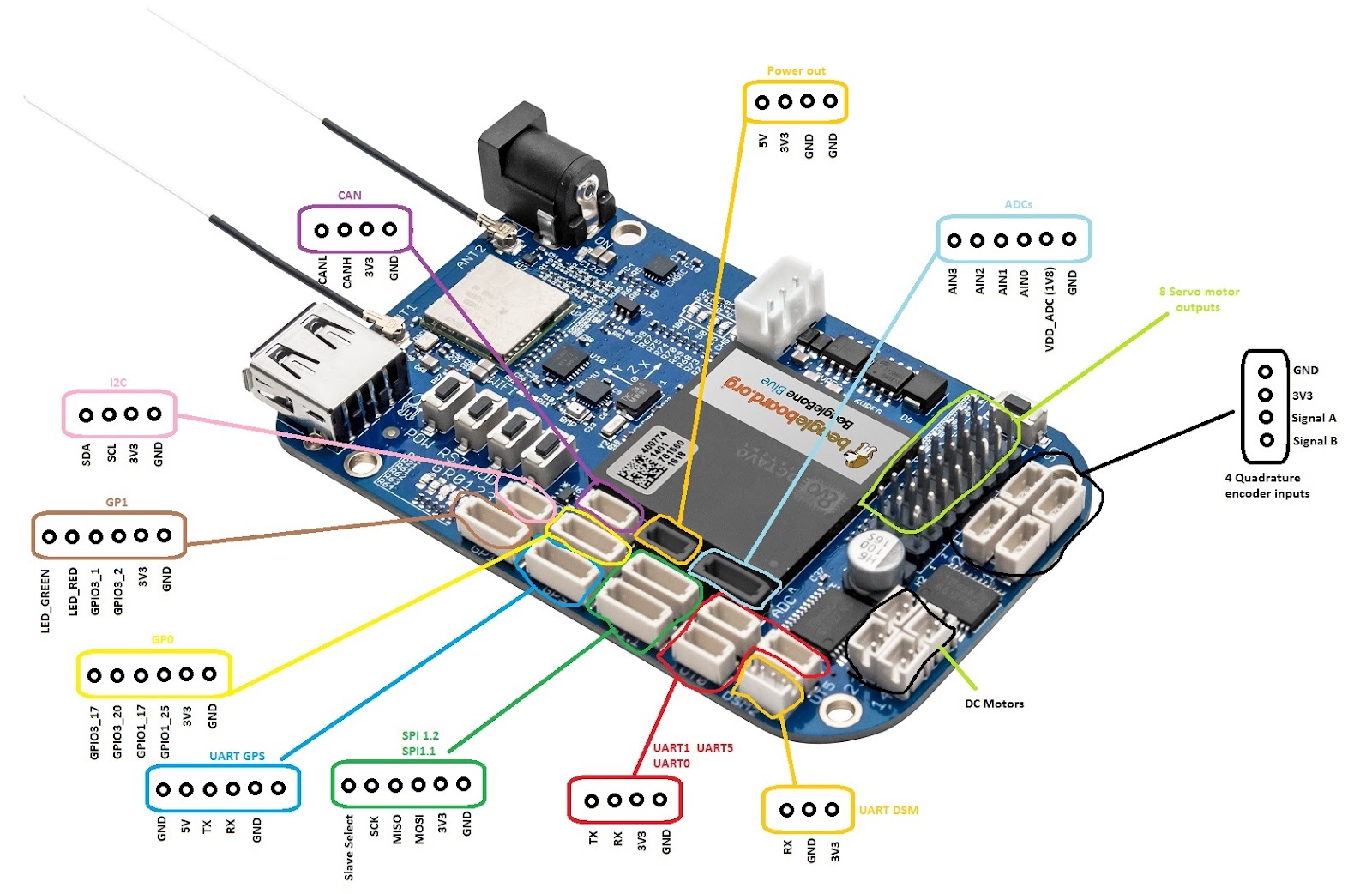
- beaglebone-blue/media/BeagleBone_Blue_pinouts.png 0 additions, 0 deletionsbeaglebone-blue/media/BeagleBone_Blue_pinouts.png
- beaglebone-blue/media/pinout.jpg 0 additions, 0 deletionsbeaglebone-blue/media/pinout.jpg
- beaglebone-blue/pinouts.rst 40 additions, 0 deletionsbeaglebone-blue/pinouts.rst
- beaglebone-blue/rev-c-priorities.rst 144 additions, 0 deletionsbeaglebone-blue/rev-c-priorities.rst
- beaglebone-blue/ssh.rst 27 additions, 0 deletionsbeaglebone-blue/ssh.rst
- beaglebone-blue/tests.rst 104 additions, 0 deletionsbeaglebone-blue/tests.rst
- beaglebone-blue/wifi.rst 35 additions, 0 deletionsbeaglebone-blue/wifi.rst
- index-tex.rst 2 additions, 1 deletionindex-tex.rst
- index.rst 1 addition, 1 deletionindex.rst
beaglebone-blue/accessories.rst
0 → 100644
beaglebone-blue/code.rst
0 → 100644
beaglebone-blue/faq.rst
0 → 100644
beaglebone-blue/flashing-firmware.rst
0 → 100644
beaglebone-blue/index.rst
0 → 100644
beaglebone-blue/ip-settings.rst
0 → 100644
{kind=link}

923 KiB
beaglebone-blue/media/pinout.jpg
0 → 100644
{kind=link}
288 KiB
beaglebone-blue/pinouts.rst
0 → 100644
beaglebone-blue/rev-c-priorities.rst
0 → 100644
beaglebone-blue/ssh.rst
0 → 100644
beaglebone-blue/tests.rst
0 → 100644
beaglebone-blue/wifi.rst
0 → 100644