
Added the simppru documentation
Showing
- index.rst 7 additions, 0 deletionsindex.rst
- simppru-examples/button_click_rpmsg.rst 44 additions, 0 deletionssimppru-examples/button_click_rpmsg.rst
- simppru-examples/delay.rst 33 additions, 0 deletionssimppru-examples/delay.rst
- simppru-examples/digital_read.rst 36 additions, 0 deletionssimppru-examples/digital_read.rst
- simppru-examples/digital_write.rst 29 additions, 0 deletionssimppru-examples/digital_write.rst
- simppru-examples/hcsr04_example_rpmsg.rst 71 additions, 0 deletionssimppru-examples/hcsr04_example_rpmsg.rst
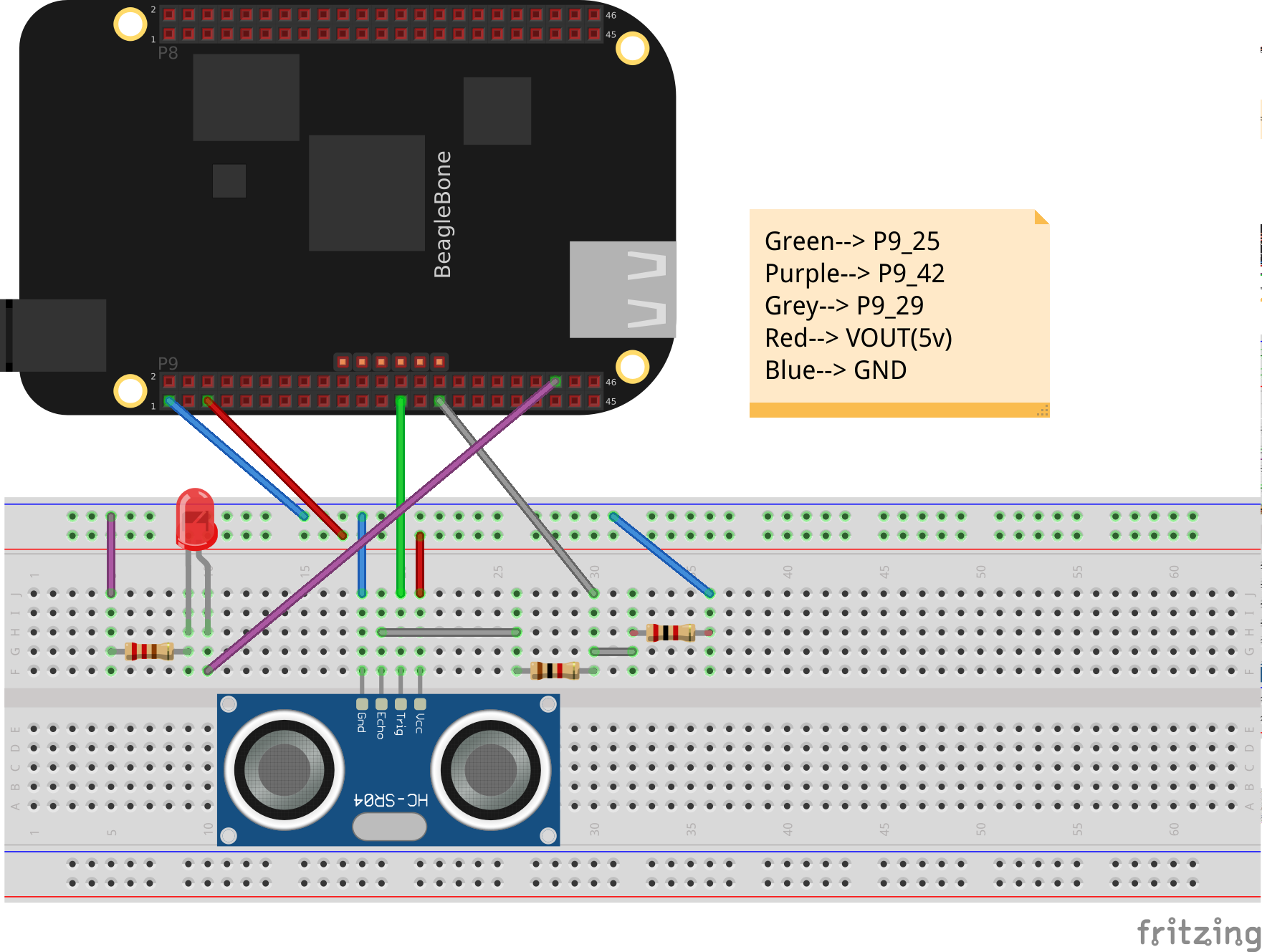
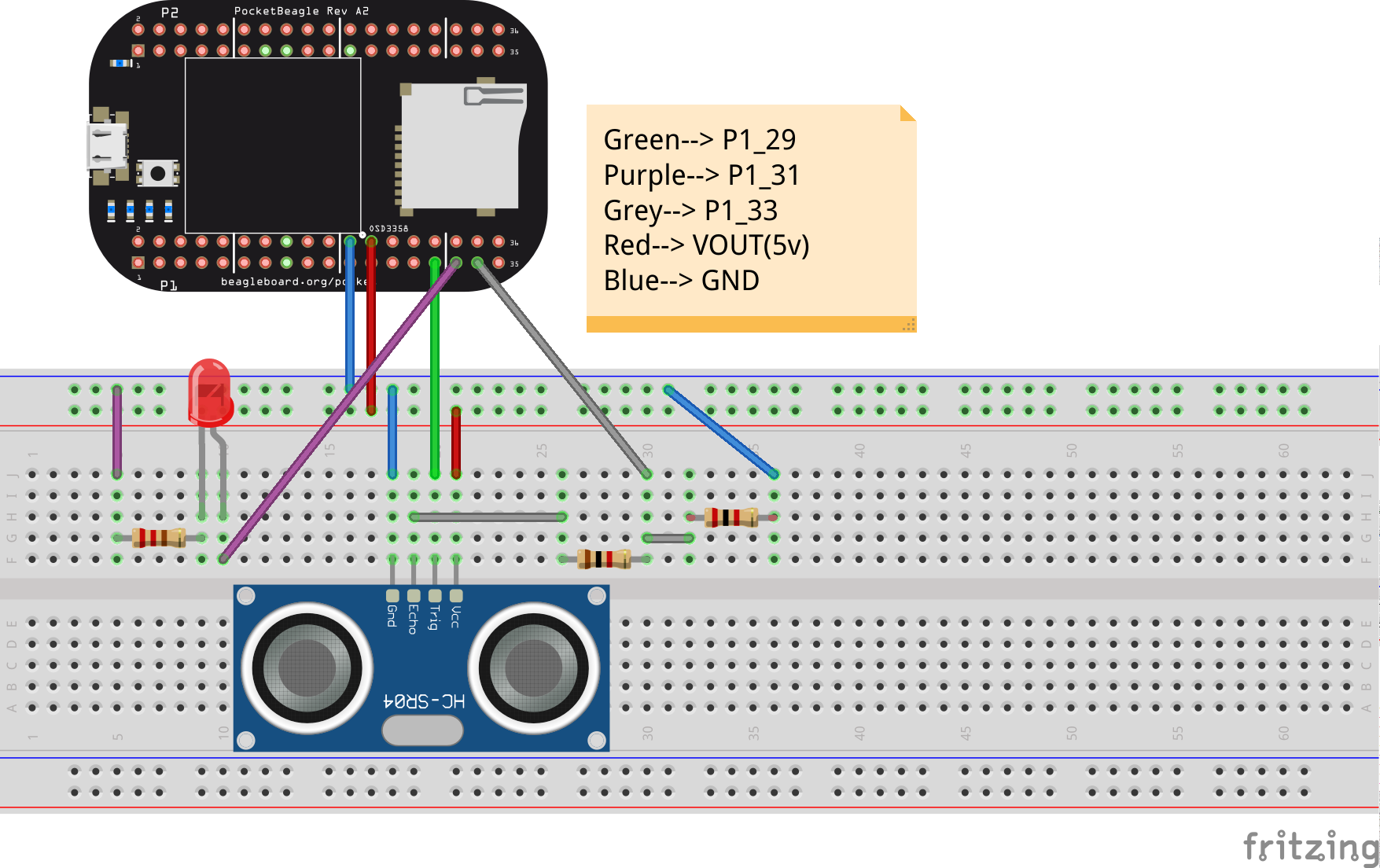
- simppru-examples/hcsr04_sensor.rst 75 additions, 0 deletionssimppru-examples/hcsr04_sensor.rst
- simppru-examples/images/hcsr04_beagle_bone_black.png 0 additions, 0 deletionssimppru-examples/images/hcsr04_beagle_bone_black.png
- simppru-examples/images/hcsr04_pocket_beagle.png 0 additions, 0 deletionssimppru-examples/images/hcsr04_pocket_beagle.png
- simppru-examples/images/led_beagle_bone_black.png 0 additions, 0 deletionssimppru-examples/images/led_beagle_bone_black.png
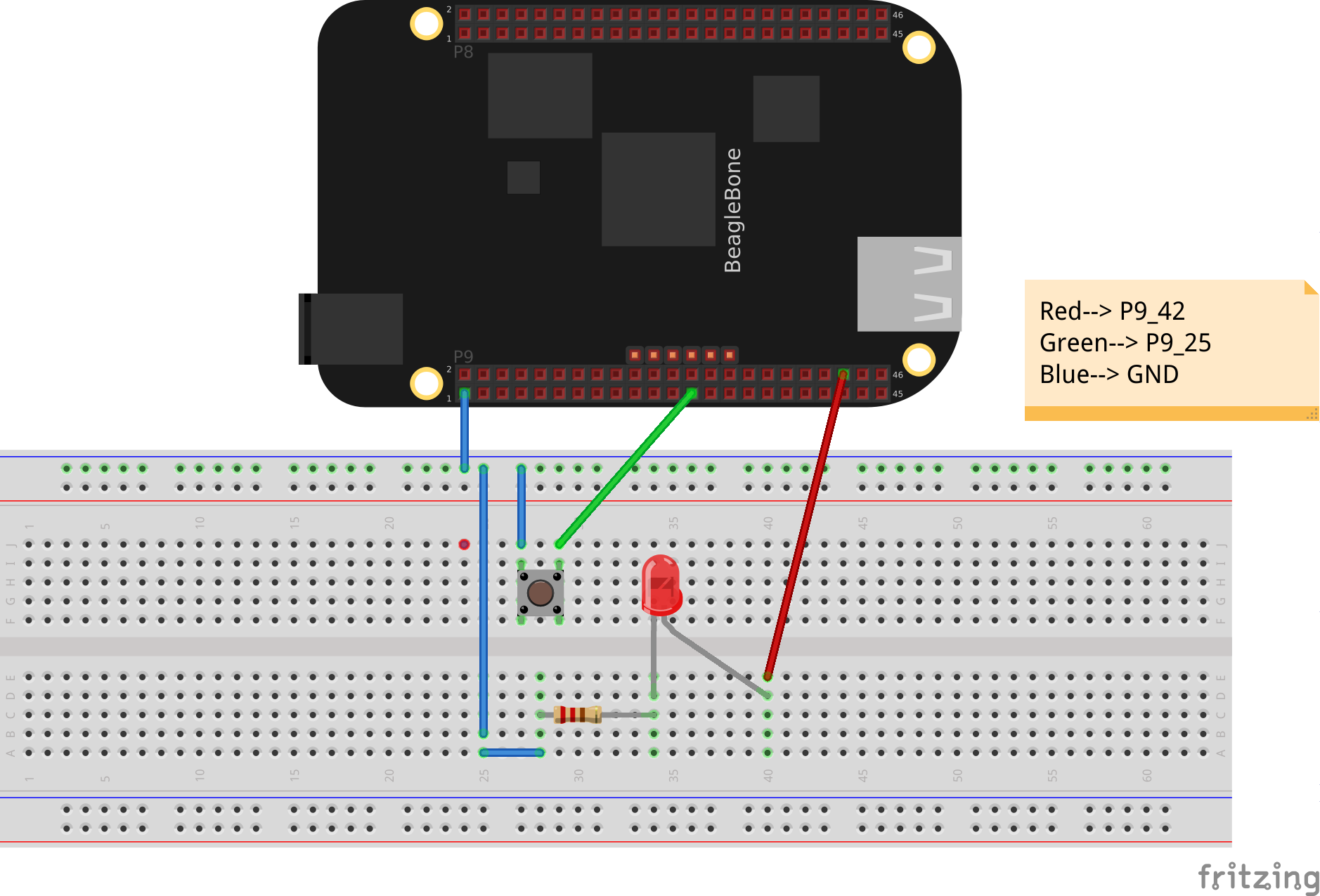
- simppru-examples/images/led_button_beagle_bone_black.png 0 additions, 0 deletionssimppru-examples/images/led_button_beagle_bone_black.png
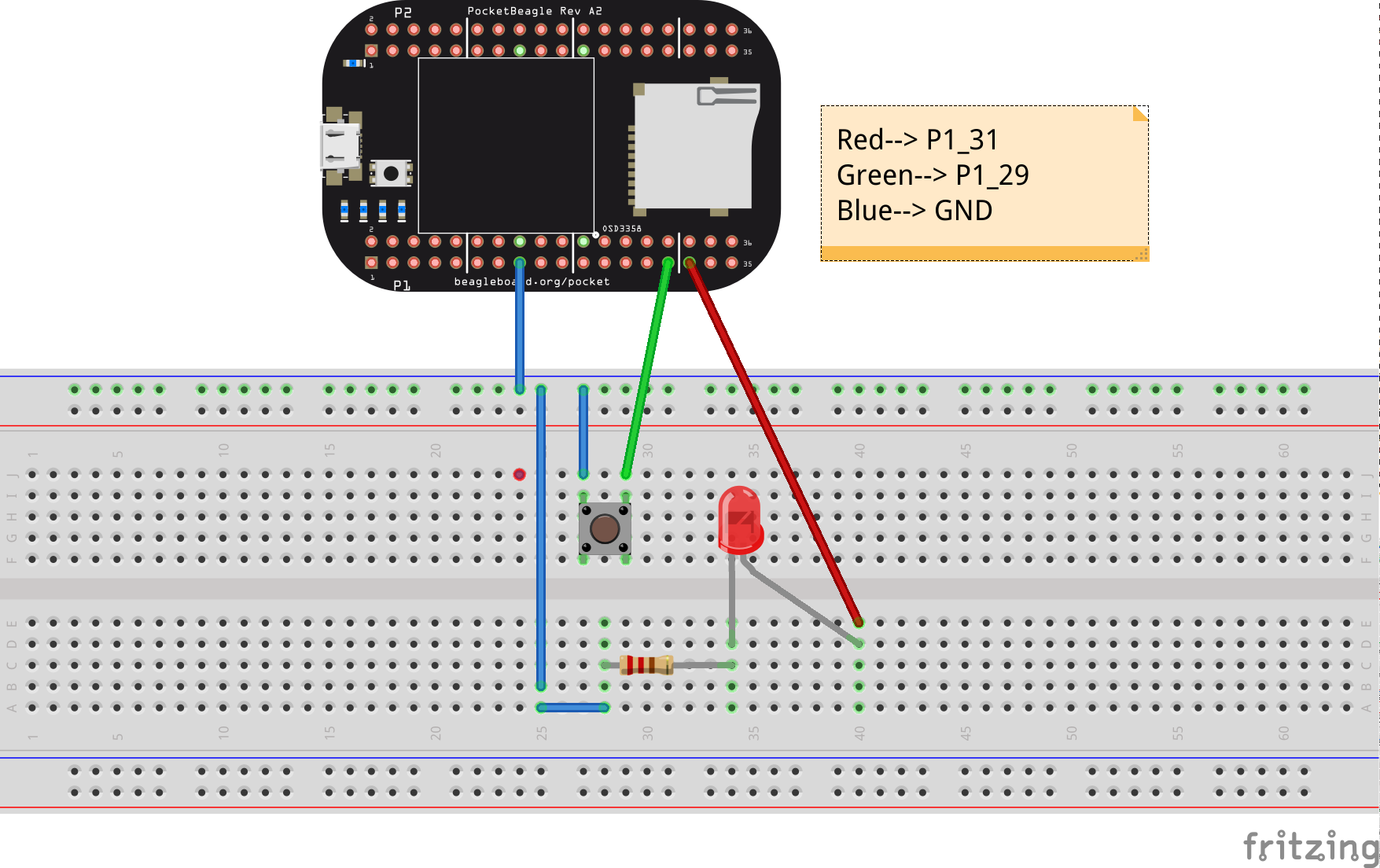
- simppru-examples/images/led_button_pocket_beagle.png 0 additions, 0 deletionssimppru-examples/images/led_button_pocket_beagle.png
- simppru-examples/images/led_pocket_beagle.png 0 additions, 0 deletionssimppru-examples/images/led_pocket_beagle.png
- simppru-examples/index.rst 53 additions, 0 deletionssimppru-examples/index.rst
- simppru-examples/led_blink.rst 34 additions, 0 deletionssimppru-examples/led_blink.rst
- simppru-examples/led_blink_button.rst 38 additions, 0 deletionssimppru-examples/led_blink_button.rst
- simppru-examples/led_blink_counter.rst 53 additions, 0 deletionssimppru-examples/led_blink_counter.rst
- simppru-examples/led_blink_for.rst 36 additions, 0 deletionssimppru-examples/led_blink_for.rst
- simppru-examples/led_blink_while.rst 34 additions, 0 deletionssimppru-examples/led_blink_while.rst
- simppru-examples/read_counter.rst 31 additions, 0 deletionssimppru-examples/read_counter.rst
simppru-examples/button_click_rpmsg.rst
0 → 100644
simppru-examples/delay.rst
0 → 100644
simppru-examples/digital_read.rst
0 → 100644
simppru-examples/digital_write.rst
0 → 100644
simppru-examples/hcsr04_example_rpmsg.rst
0 → 100644
simppru-examples/hcsr04_sensor.rst
0 → 100644
{kind=link}
358 KiB
{kind=link}
369 KiB
{kind=link}

252 KiB
{kind=link}
263 KiB
{kind=link}
307 KiB
{kind=link}

290 KiB
simppru-examples/index.rst
0 → 100644
simppru-examples/led_blink.rst
0 → 100644
simppru-examples/led_blink_button.rst
0 → 100644
simppru-examples/led_blink_counter.rst
0 → 100644
simppru-examples/led_blink_for.rst
0 → 100644
simppru-examples/led_blink_while.rst
0 → 100644
simppru-examples/read_counter.rst
0 → 100644