Commits on Source (12)
-
 Deepak Khatri authored05337e55
Deepak Khatri authored05337e55 -
 74201506
74201506 -
Deepak Khatri authored
PicoRV-Softcore documentation See merge request !179
-
Deepak Khatri authored
fix#84feedback-missing-pointers See merge request !184
-
Deepak Khatri authoredac9dd083
-
fa9519af
-
Deepak Khatri authored2c0f855a
-
Deepak Khatri authored
Fix build errors and BeagleY-AI demos index Closes #85 See merge request !187
-
Deepak Khatri authored910ab278
-
Deepak Khatri authoredaf5c2e63
-
Deepak Khatri authored35f33e48
-
Deepak Khatri authored
Add PocketBeagle 2 documentation updates See merge request !188
Showing
- boards/beagleplay/05-demos.rst 2 additions, 1 deletionboards/beagleplay/05-demos.rst
- boards/beaglev/fire/05-demos.rst 1 addition, 0 deletionsboards/beaglev/fire/05-demos.rst
- boards/beaglev/fire/demos-and-tutorials/gateware/deploy-and-program-picorv-softcore.rst 169 additions, 0 deletions...tutorials/gateware/deploy-and-program-picorv-softcore.rst
- boards/beagley/ai/01-introduction.rst 2 additions, 2 deletionsboards/beagley/ai/01-introduction.rst
- boards/beagley/ai/05-demos.rst 0 additions, 2 deletionsboards/beagley/ai/05-demos.rst
- boards/beagley/ai/images/components-location/back.png 0 additions, 0 deletionsboards/beagley/ai/images/components-location/back.png
- boards/beagley/ai/images/components-location/back.webp 0 additions, 0 deletionsboards/beagley/ai/images/components-location/back.webp
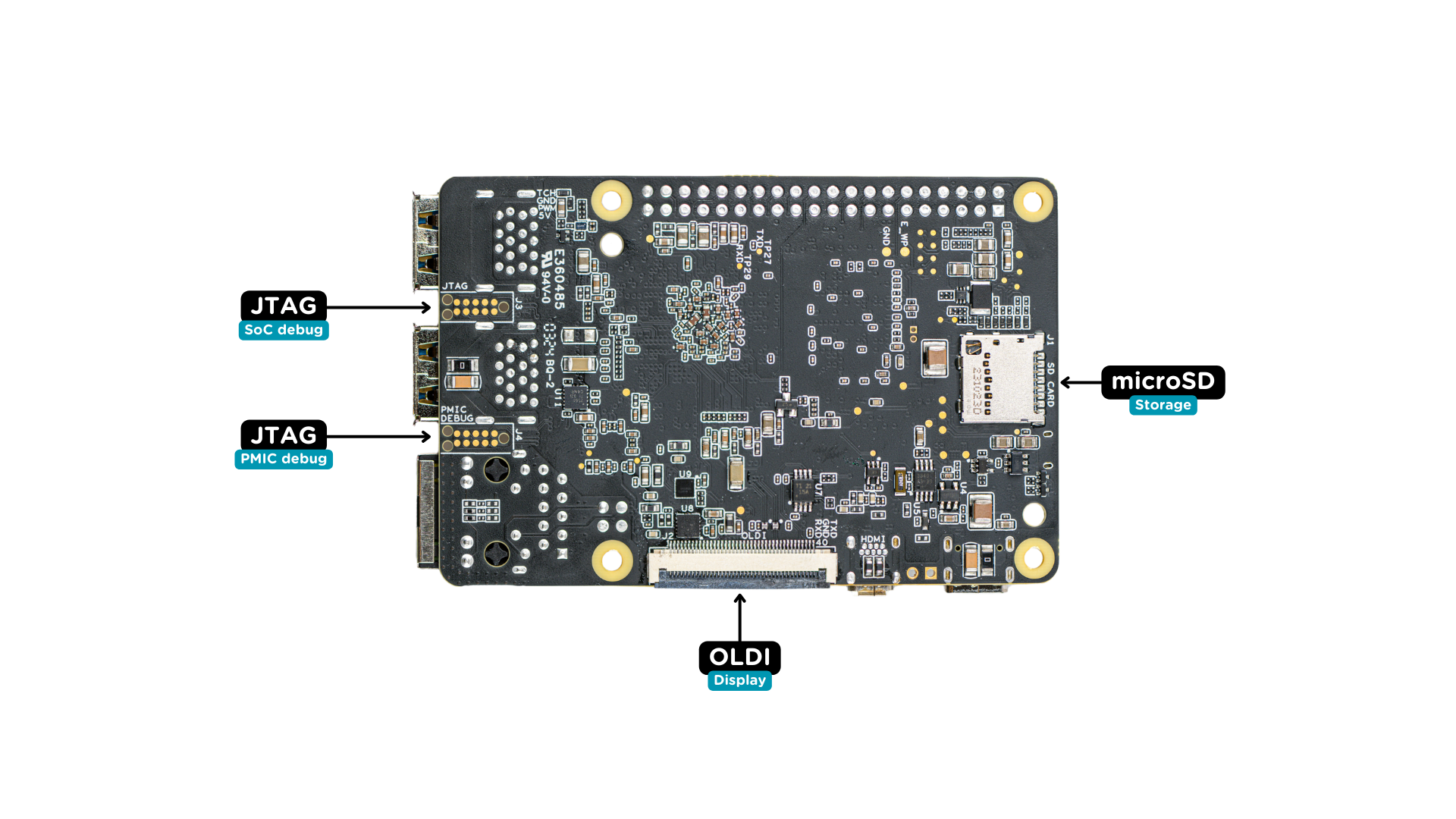
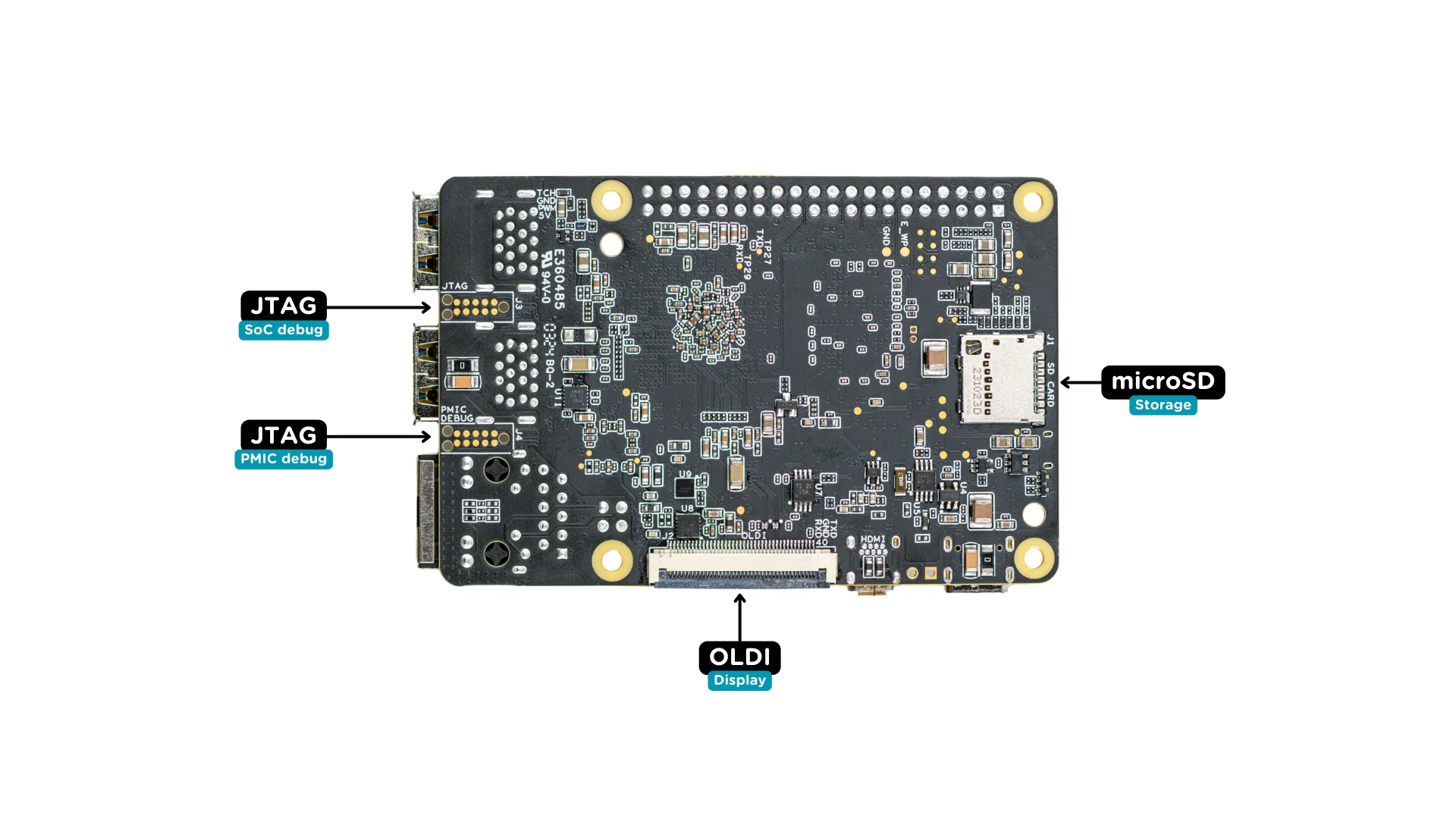
- boards/beagley/ai/images/components-location/beagley-ai-board-back-annotated.jpg 0 additions, 0 deletions...s/components-location/beagley-ai-board-back-annotated.jpg
- boards/beagley/ai/images/components-location/beagley-ai-board-back-annotated.webp 0 additions, 0 deletions.../components-location/beagley-ai-board-back-annotated.webp
- boards/beagley/ai/images/components-location/beagley-ai-board-front-annotated.jpg 0 additions, 0 deletions.../components-location/beagley-ai-board-front-annotated.jpg
- boards/beagley/ai/images/components-location/beagley-ai-board-front-annotated.webp 0 additions, 0 deletions...components-location/beagley-ai-board-front-annotated.webp
- boards/beagley/ai/images/components-location/front.png 0 additions, 0 deletionsboards/beagley/ai/images/components-location/front.png
- boards/beagley/ai/images/components-location/front.webp 0 additions, 0 deletionsboards/beagley/ai/images/components-location/front.webp
- boards/capes/index.rst 4 additions, 3 deletionsboards/capes/index.rst
- boards/pocketbeagle-2/01-introduction.rst 1 addition, 1 deletionboards/pocketbeagle-2/01-introduction.rst
- boards/pocketbeagle-2/02-quick-start.rst 180 additions, 13 deletionsboards/pocketbeagle-2/02-quick-start.rst
- boards/pocketbeagle-2/images/connection-diagrams/tethered-connection.jpg 0 additions, 0 deletions...agle-2/images/connection-diagrams/tethered-connection.jpg
- boards/pocketbeagle-2/images/misc/serial-connection.png 0 additions, 0 deletionsboards/pocketbeagle-2/images/misc/serial-connection.png
- boards/pocketbeagle-2/images/misc/serial-debug.png 0 additions, 0 deletionsboards/pocketbeagle-2/images/misc/serial-debug.png
- boards/pocketbeagle-2/images/misc/ssh-connection.png 0 additions, 0 deletionsboards/pocketbeagle-2/images/misc/ssh-connection.png
1.15 MiB
148 KiB

{kind=link}
{kind=link}
{kind=link}
{kind=link}

105 KiB
{kind=link}

277 KiB
{kind=link}

151 KiB
{kind=link}

1.28 MiB
{kind=link}

152 KiB
{kind=link}

176 KiB
{kind=link}

45.1 KiB
{kind=link}

114 KiB
{kind=link}

88.6 KiB