
Merge branch 'updateBasics' into 'main'
Update basics See merge request docs/docs.beagleboard.io!159
Showing
- boards/beagley/ai/02-quick-start.rst 1 addition, 1 deletionboards/beagley/ai/02-quick-start.rst
- books/beaglebone-cookbook/01basics/basics.rst 63 additions, 40 deletionsbooks/beaglebone-cookbook/01basics/basics.rst
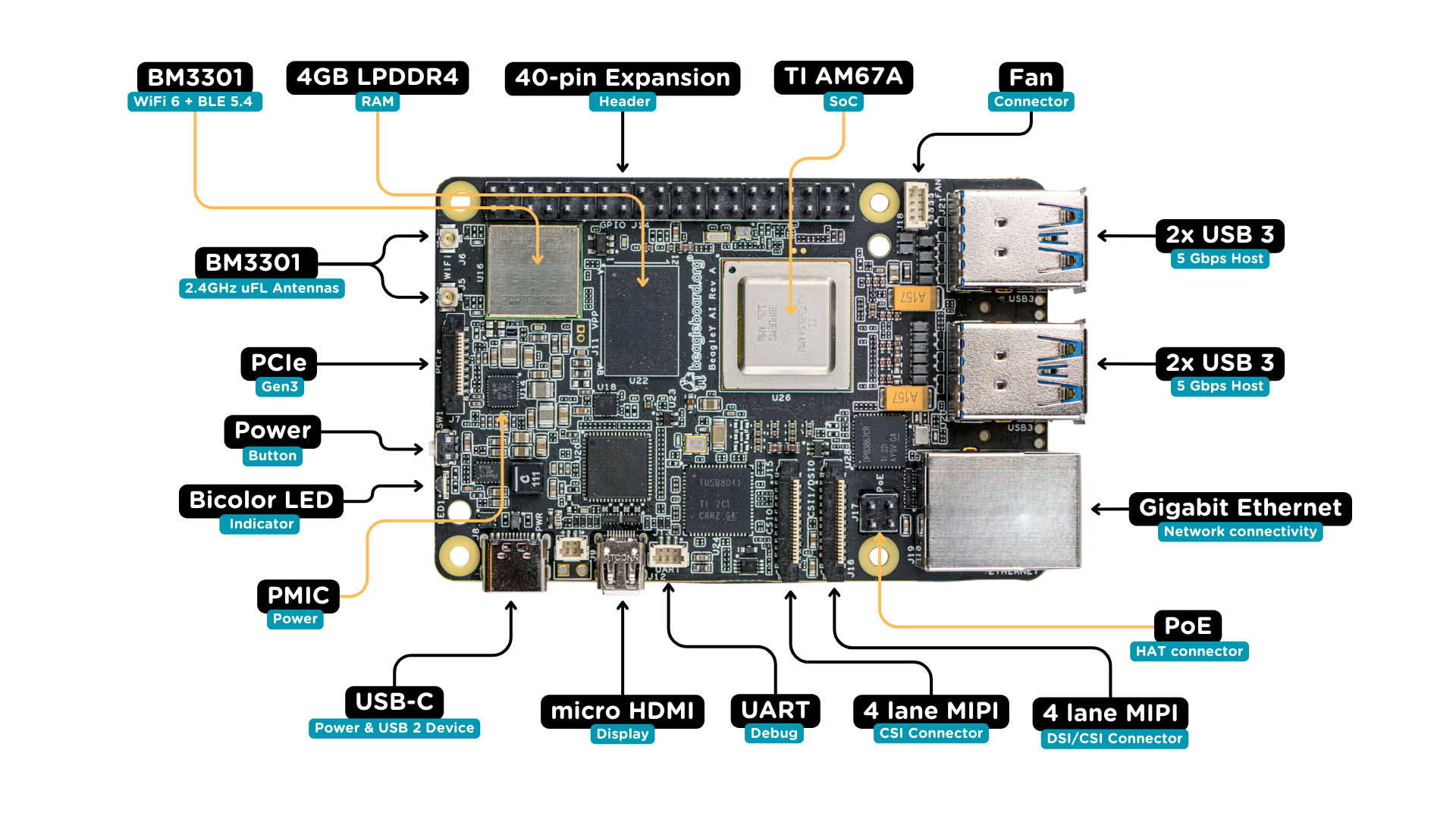
- books/beaglebone-cookbook/02sensors/figures/beagleY-ai-front.png 0 additions, 0 deletions...eaglebone-cookbook/02sensors/figures/beagleY-ai-front.png
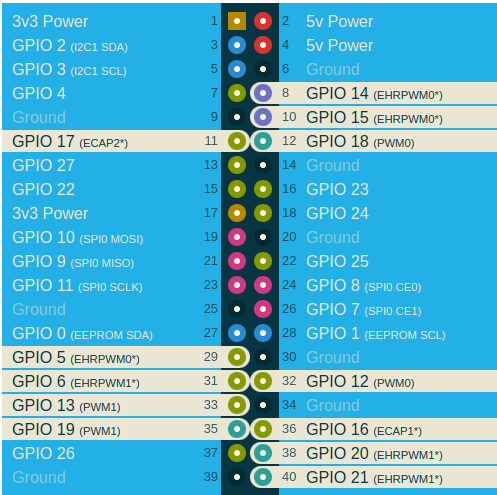
- books/beaglebone-cookbook/02sensors/figures/pinout.png 0 additions, 0 deletionsbooks/beaglebone-cookbook/02sensors/figures/pinout.png
- books/beaglebone-cookbook/02sensors/sensors.rst 189 additions, 51 deletionsbooks/beaglebone-cookbook/02sensors/sensors.rst
- books/beaglebone-cookbook/04motors/figures/pwm.png 0 additions, 0 deletionsbooks/beaglebone-cookbook/04motors/figures/pwm.png
- books/beaglebone-cookbook/04motors/motors.rst 80 additions, 7 deletionsbooks/beaglebone-cookbook/04motors/motors.rst
- books/beaglebone-cookbook/05tips/figures/jst-fdti.jpg 0 additions, 0 deletionsbooks/beaglebone-cookbook/05tips/figures/jst-fdti.jpg
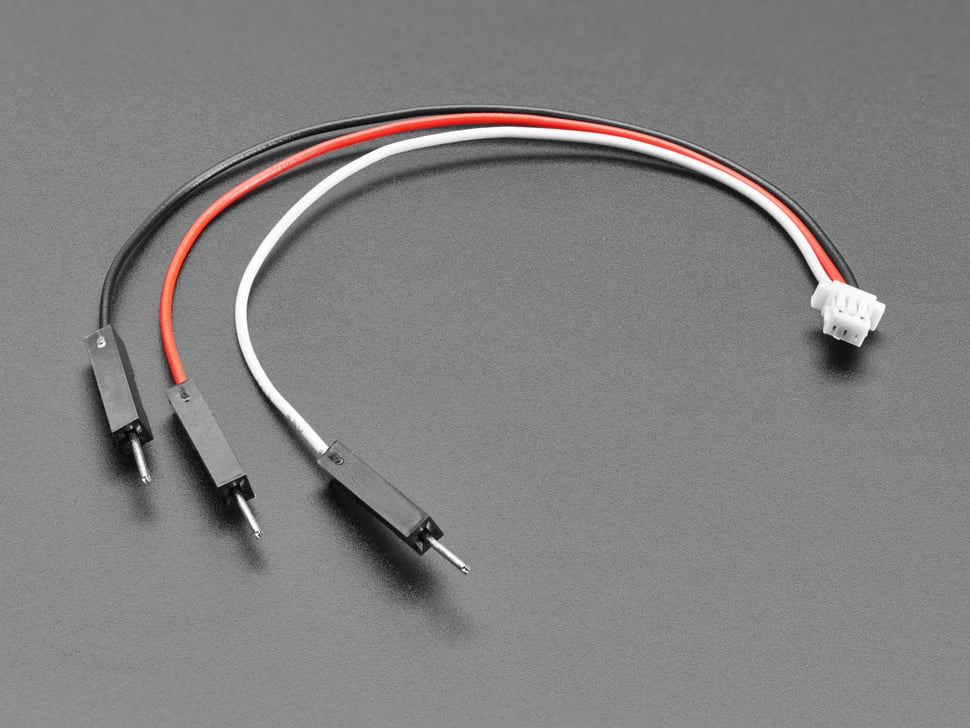
- books/beaglebone-cookbook/05tips/figures/jst-sh-3-pin.jpg 0 additions, 0 deletionsbooks/beaglebone-cookbook/05tips/figures/jst-sh-3-pin.jpg
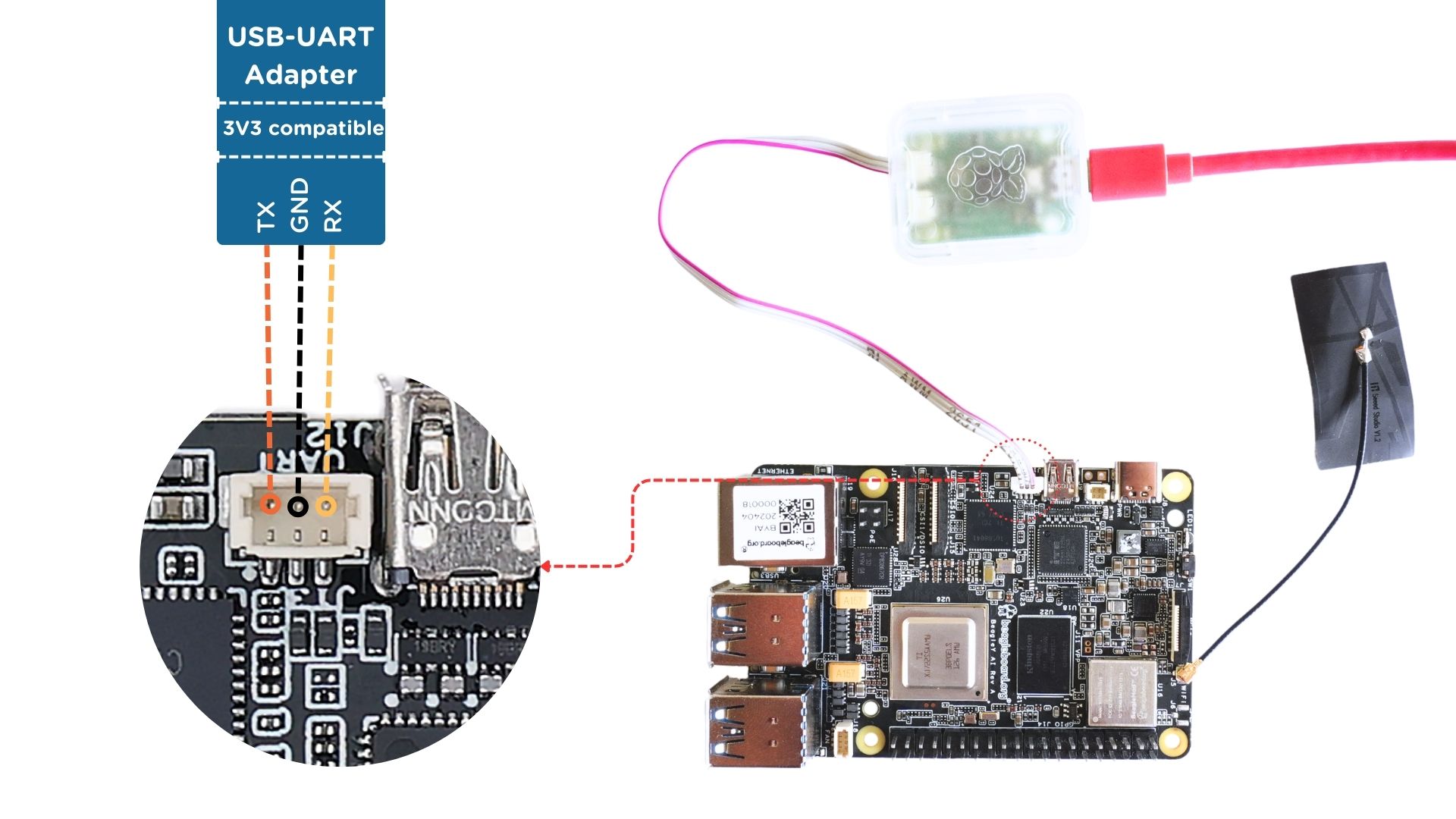
- books/beaglebone-cookbook/05tips/figures/rpi-debug-probe-connection.jpg 0 additions, 0 deletions...ne-cookbook/05tips/figures/rpi-debug-probe-connection.jpg
- books/beaglebone-cookbook/05tips/tips.rst 114 additions, 51 deletionsbooks/beaglebone-cookbook/05tips/tips.rst
- books/beaglebone-cookbook/06iot/iot.rst 1 addition, 1 deletionbooks/beaglebone-cookbook/06iot/iot.rst
{kind=link}
1.28 MiB
{kind=link}

307 KiB
{kind=link}
89.2 KiB
{kind=link}

279 KiB
{kind=link}
84.2 KiB
{kind=link}
203 KiB